
Menerapkan Instalasi Motor Listrik berbagai Kendali, Motor Direct ON Line (DOL), Run-Jogging, Forward–Reverse, Berurutan, dan Bergantian
menerapkan instalasi motor listrik berbagai kendali - INSTALASI MOTOR LISTRIK BERBAGAI KENDALI
Setelah mempelajari materi tentang Instalasi motor listrik berbagai kendali diharapkan siswa mampu, mengidentifikasi, mensimulasikan dan mengoperasikan instalasi motor listrik berbagai kendali dengan kreatif dan bertanggung jawab.
, Run-Jogging, Forward–Reverse, Berurutan, dan Bergantian")
Gambar 7.1 Conveyor
Sumber: https:/ / berempat.com/ bisnis/ 7727/ apa-saja-jenis-flexibel-Conveyor-yang-bisa-dibeli-tanpa-impor/
Pernahkah kalian melihat Conveyor, peralatan/ mesin yang digunakan untuk mentransfer bahan baku atau material yang dilakukan dalam dunia industri. Kebutuhan pabrik untuk bisa mentransfer bahan baku atau material dengan cepat menuntut pelaku industri untuk bisa memiliki alat yang cepat, efisien, dan tepat. Mesin itu disebut Conveyor.
Baca juga: JENIS DAN KARAKTERISTIK MOTOR LISTRIK
Lalu bagaimana mesin ini di kendalikan? Rangkaian pengendali seperti apa yang digunakan? Bagaimana prinsip kerjanya? Apa hubungannya dengan pengendali motor? Untuk memahami pertanyaan-pertanyaan tersebut mari kita pelajari materi tentang instalasi motor listrik berbagai berbagai kendali pada bab ini.
A. Pengendali Motor Direct ON Line (DOL)
Rangkaian DOL (Direct ON Line) merupakan rangkaian pengendali motor yang paling dasar/ sederhana, rangkain ini hanya terdiri dari satu tombol START/ ON dan satu tombol STOP/ OFF.
a. Rangkaian Kontrol b. Rangkaian Daya

Gambar 7.2 Rangkaian Kontrol dan Daya pengendali motor DOL
Sumber: Dokumen pribadi
Prinsip kerja rangkaian adalah:
Dalam kondisi normal rangkaian dalam kondisi terbuka (NO). Saat MCB tertutup kemudian tombol START ditekan rangkaian control akan tertutup sehingga akan ada aliran arus listrik dari sumber ke MCB, TOR, kontaktor K1 kemudian ke Netral. Setelah kontaktor mendapat aliran listrik maka kontaktor akan bekerja, kontak bantu 13-14 tertutup, kontak ini sebagai pengunci, Sehingga walaupun tombol START dilepas arus listrik tetap mengalir.
Baca juga: MACAM MACAM PENGENDALI MOTOR LISTRIK
Selanjutnya arus listrik akan mengalir ke motor melalui kontak utama 1-2 3-4 dan 5-6 sehingga motor berputar. Untuk menghentikan motor cukup menekan tombol STOP, maka aliran listrik akan berhenti, dan motor akan berhenti berputar.
B. Pengendali Motor Run-Jogging
Pengendali dengan system ini banyak di pakai dalam ban berjalan, untuk memindahkan benda, terutama pada pabrik perakitan. Juga banyak digunakan pada kran berjalan yaitu untuk memindahkan barang-barang yang berat, maka perlu pengendalian motor sesaat. Prinsip kerja pengendali ini yaitu jika tombol start ditekan motor akan berputar, jika tombol dilepas motor akan berhenti berputar.
a. Rangkaian Kontrol b. Rangkaian Daya

Gambar 7.3 Rangkaian Kontrol dan Daya pengendali motor Run-Jogging
Sumber: Dokumen pribadi
Prinsip kerja rangkaian adalah:
Pada saat MCB ditutup dan tombol RUN ditekan akan terjadi aliran listrik dari MCB, TOR, Kontaktor dan ke Netral pada rangkaian kontrolnya. Sedangkan rangkaian dayanya akan ada aliran listrik ke motor listrik sehingga motor beroperasi. Untuk menghentikan motor cukup menekan tombol STOP. Bila tombol JOG ditekan maka kontaktor akan mendapatkan aliran listrik sehingga motor akan berputar, jika tombol JOG dilepas motor akan berhenti.
C. Pengendali Motor Forward–Reverse
Dalam operasional pada industri banyak memerlukan motor dengan kerja dua arah putar, baik untuk motor 1 fasa atau 3 fasa. Dalam membalik arah putaran motor 1 fase dengan cara membalik dua ujung belitan bantu, sedangkan motor tiga fasa dengan cara membalik dua ujung belitan fasa.
a. Rangkaian Kontrol b. Rangkaian Daya

Gambar 7.4 Rangkaian Kontrol dan Daya pengendali motor Forward–Reverse
Sumber: Dokumen pribadi
Prinsip kerja rangkaian Forward–Reverse adalah:
Jika tombol ON1 ditekan maka K1 akan mendapatkan arus listrik sehingga kontaktor 1 bekerja dan motor berputar ke kiri. Jika ON2 ditekan maka K2 akan mendapatkan arus listrik sehingga kontaktor 2 bekerja dan motor beputar kekanan.
Saat motor berputar ke kiri, selanjutnya tombol ON2 ditekan maka motor tidak akan bisa berputar kekanan. Begitu juga sebaliknya, agar biasa berputar dengan arah sebaliknya harus ditekan tombol STOP dahulu baru tombol ON yang diinginkan.
D. Pengendali Motor Berurutan
a. Rangkaian Kontrol

Sumber: Dokumen pribadi
b. Rangkaian Daya
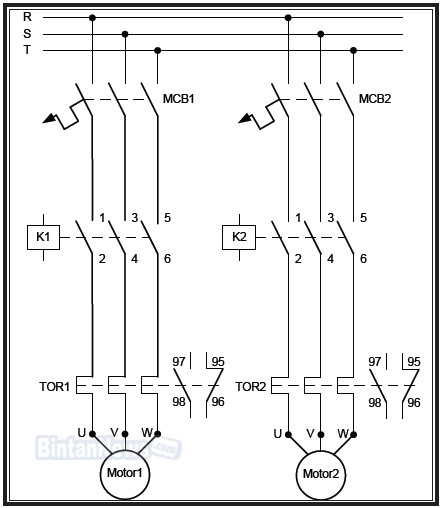
Gambar 7.5 Rangkaian Kontrol dan Daya pengendali motor berurutan
Sumber: Dokumen pribadi
Pengendali ini banyak digunakan pada industri yang menggerakan motor secara berurutan, maksudnya adalah motor 2 tidak akan bisa bekerja jika motor 1 tidak bekerja, begitu juga saat mematikan motor 1 tidak akan mati jika motor 2 tidak mati dahulu.
Aplikasi rangkaian ini biasanya terdapat pada konveyor pembawa bahan produksi dari satu tempat ke tempat lain, urutan start motor dimulai dari motor paling bawah (hilir) ke motor paling atas (hulu), kemudian untuk menghentikan dimulai dari motor paling atas (hulu) ke motor paling bawah bawah (hilir).
Prinsip kerja rangkaian:
Pada rangkaian ini menjalankan motor harus didahulukan dengan menjalankan motor 1 terlebih dahulu kemudian diikuti motor 2, jika didahulukan motor 2 maka rangkaian tidak merespon. Untuk menjalankan motor dimulai dengan tekan tombol ON1, setelah itu diikuti tombol ON2. Sedangkan untuk menghentikan motor dengan cara tekan tombol OFF2 kemudian diikuti dengan tombol OFF1
E. Pengendali Motor Bergantian
Pengendali ini digunakan pada pengendalian dua buah motor yang tidak diperbolehkan bekerja bersama-sama, harus secara bergantian. Pengendali ini mirip dengan motor berurutan, tetapi untuk tombol ON1 dan ON2 menggunakan push button NO-NC.
a. Rangkaian Kontrol


Gambar 7.6 Rangkaian Kontrol dan Daya pengendali motor bergantian
Sumber: Dokumen pribadi
Prinsip kerja rangkaian
Pada saat tombol ON1 ditekan maka kontaktor 1 akan bekerja sehingga motor1 berputar, kemudian tombol ON2 ditekan maka motor 1 akan berhenti berputar dan berganti motor 2 yang berputar, selanjutnya kembali tombol ON1 ditekan motor 2 akan berhenti dan motor 1 berputar dan seterusnya. Pada saat salah satu motor berputar kemudian akan menjalankan motor berikutnya maka sebaliknya tekan tombol STOP dahulu.
PRAKTIKUM 1
Pengendali motor Direct ON Line (DOL)
A. Tujuan
Siswa mampu merangkai dan mengoperasikan pengendali motor Direct ON Line (DOL)
B. Alat beserta Bahan
1. Tool box
2. Multimeter
3. Meger
4. Panel
5. Kabel duct
6. Rel omega
7. Push button NC
8. MCB 3p 1 buah
9. Kontaktor
10. TOR 1 buah
11. Push button NO
12. Motor 3p
13. Kabel NYAF secukupnya
C. Petunjuk Praktikum
1. Kerjakan praktikum dengan hati-hati dan sebaik-baiknya dengan memperhatikan K3!
2. Jagalah kebersihan lingkungan praktik dan alat praktik!
3. Apabila telah selesai, peralatan praktik dikembalikan pada tempat semula!
D. Langkah-langkah Kerja
1. Menyiapkan alat beserta bahan-bahan yang digunakan
2. Buatlah wiring rangkaian kontrol dan daya pada panel sesuai dengan gambar di bawah ini!

Rangkaian kontrol Rangkaian daya
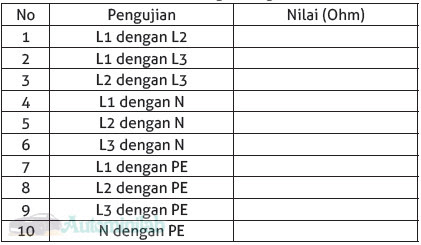
3. Lakukan pengukuran menggunakan alat ukur sesuai tabel di bawah ini!
a. Hubung singkat dengan ohmmeter

b. Tahanan Isolasi dengan meger

4. Pengoperasian rangkaian
Buatlah laporan dari hasil pengoperasian rangkaian, masalah apa yang muncul kemudian carilah solusinya.
Baca juga: SISTEM PROTEKSI MOTOR LISTRIK
PRAKTIKUM 2
Pengendali Motor Run-Jogging
A. Tujuan
Siswa mampu merangkai dan mengoperasikan pengendali Motor Run- Jogging
B. Alat Beserta Bahannya
1. Meger
2. Multimeter
3. Tool box
4. Panel
5. Kabel duct
6. Push button NC
7. Rel omega
8. MCB 3p 1 buah
9. TOR 1 buah
10. Push button NO
11. Kontaktor
12. Push button NO-NC
13. Motor 3p
14. Kabel NYAF secukupnya
C. Petunjuk Praktikum
1. Kerjakan praktikum dengan hati-hati dan sebaik-baiknya dengan memperhatikan K3!
2. Jagalah kebersihan lingkungan praktik dan alat praktik!
3. Apabila telah selesai, peralatan praktik dikembalikan pada tempat semula!
D. Langkah-langkah Kerja
1. Menyiapkan alat beserta bahannya
2. Membuat wiring pada rangkaian kontrol dan daya pada panel sesuai dengan gambar di bawah ini!

a. Rangkaian Kontrol b. Rangkaian Daya
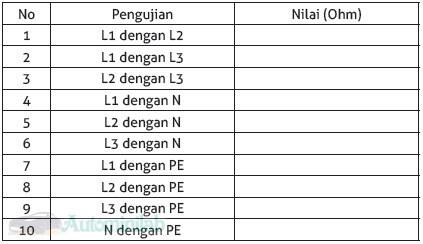
1. Lakukan pengukuran dengan alat ukur sesuai tabel di bawah ini!
a. Hubung singkat dengan ohmmeter

b. Tahanan Isolasi dengan meger
2. Pengoperasian rangkaian
Buatlah laporan dari hasil pengoperasian rangkaian, masalah apa yang muncul kemudian carilah solusinya.
Baca juga: Menerapkan instalasi motor listrik satu pase dan tiga pase dengan kendali elektromagnetik
PRAKTIKUM 3
Penegendali Motor Forward–Reverse
A. Tujuan
Siswa mampu merangkai dan mengoperasikan pengendali Motor Forward– Reverse
B. Alat Beserta Bahannya
1. Meger
2. Multimeter
3. Tool box
4. Panel
5. Kabel duct
6. Rel omega
7. MCB 3p 1 buah
8. TOR 1 buah
9. Push button NO 2 buah
10. Push button NC 1 buah
11. Kontaktor 2 buah
12. Motor 3p
13. Kabel NYAF secukupnya
C. Petunjuk Praktikum
1. Kerjakan praktikum dengan hati-hati dan sebaik-baiknya dengan memperhatikan K3!
2. Jagalah kebersihan lingkungan praktik dan alat praktik!
3. Apabila telah selesai, peralatan praktik dikembalikan pada tempat semula!
D. Langkah-langkah Kerja
1. Menyiapkan alat beserta bahannya
2. Membuat wiring pada rangkaian kontrol dan daya pada panel sesuai dengan gambar di bawah ini!

a. Rangkaian Kontrol b. Rangkaian Daya
1. Lakukan pengukuan dengan alat ukur sesuai tabel di bawah ini!
a. Hubung singkat dengan omhmeter

b. Tahanan Isolasi dengan meger

2. Pengoperasian rangkaian
Buatlah laporan dari hasil pengoperasian rangkaian, masalah apa yang muncul kemudian carilah solusinya
PRAKTIKUM 4
Penegendali Motor Berurutan
A. Tujuan
Siswa mampu merangkai dan mengoperasikan pengendali Motor berurutan
B. Alat Beserta Bahannya
1. Meger
2. Tool box
3. Panel
4. Kabel duct
5. Rel omega
6. MCB 3p 2 buah
7. TOR 2 buah
8. Push button NO 2 buah
9. Push button NC 2 buah
10. Kontaktor 2 buah
11. Motor 3p
12. Kabel NYAF secukupnya
C. Petunjuk Praktikum
1. Kerjakan praktikum dengan hati-hati dan sebaik-baiknya dengan
memperhatikan K3!
2. Jagalah kebersihan lingkungan praktik dan alat praktik!
3. Apabila telah selesai, peralatan praktik dikembalikan pada tempat
semula!
4. Langkah-langkah Kerja
1. Menyiapkan alat beserta bahannya
2. Membuat wiring pada rangkaian kontrol dan daya pada panel sesuai
dengan gambar di bawah ini!

a. Rangkaian Kontrol b. Rangkaian Daya
3. Lakukan pengukuran dengan alat ukur sesuai tabel di bawah ini!
a. Hubung singkat dengan ohmmeter

b. Tahanan Isolasi dengan meger

4. Pengoperasian rangkaian
Buatlah laporan dari hasil pengoperasian rangkaian, masalah apa yang
muncul kemudian carilah solusinya.
PRAKTIKUM 5
Penegendali motor Forward–Reverse otomatis
A. Tujuan
Siswa mampu merangkai dan mengoperasikan pengendali Motor Forward–Reverse otomatis
B. Alat Beserta Bahannya
1. Meger
2. Multimeter
3. Tool box
4. Panel
5. Kabel duct
6. Rel omega
7. MCB 3p 1 buah
8. TOR 1 buah
9. Switch ON-OFF 1 buah
10. Kontaktor 2 buah
11. TDR 4 buah
12. Motor 3p
13. Kabel NYAF
C. Petunjuk Praktikum
1. Kerjakan praktikum dengan hati-hati dan sebaik-baiknya dengan
memperhatikan K3!
2. Jagalah kebersihan lingkungan praktik dan alat praktik!
3. Apabila telah selesai, peralatan praktik dikembalikan pada tempat
semula!
D. Langkah-langkah Kerja
1. Menyiapkan alat beserta bahannya
2. Membuat wiring pada rangkaian kontrol dan daya pada panel sesuai
dengan gambar di bawah ini!

a. Rangkaian Kontrol

b. Rangkaian Daya
1. Lakukan pengukuan dengan alat ukur sesuai tabel di bawah ini!
a. Hubung singkat dengan ohmeter

b. Tahanan Isolasi dengan meger
2. Pengoperasian rangkaian
Buatlah laporan dari hasil pengoperasian rangkaian, masalah apa yang
muncul kemudian carilah solusinya.
CAKRAWALA
KONTAKTOR PERTAMA
Kontaktor muncul sekitar tahun 1950 oleh perusahaan OEM HVACR (Original Equipment Manufacturer Heating Ventilation Air Conditioning and Refrigeration) bersama dengan beberapa perusahaan lain yang bergerak dalam bidang elektrikal yang memiliki tujuan untuk membuat kontaktor yang murah dan ramah lingkungan.
Unit elektrikal ini awalnya diperuntukan untuk pasar di benua Amerika Utara sudah berstandart NEMA. Namun, perusahaan HVACR ini mentargetkan pasar asia juga yang berstandart ICE dan sampai saat ini kita bisa menggunakannya dalam instalasi kelistrikan.
☺☺☺☺☺☺ TERIMAKASIH ☺☺☺☺☺
Demikian pembahasan menerapkan instalasi motor listrik berbagai kendali, Pengendali Motor Direct ON Line (DOL), Pengendali Motor Run-Jogging, Pengendali Motor Forward–Reverse, Pengendali Motor Berurutan, Pengendali Motor Bergantian
Post a Comment for "Menerapkan Instalasi Motor Listrik berbagai Kendali, Motor Direct ON Line (DOL), Run-Jogging, Forward–Reverse, Berurutan, dan Bergantian"